

Materia Programable (Arcillotrónica)
— Ensayos hipotéticos sobre la tecnología ybymarense —
1. Conceptos iniciales
Arcillotrónica (claytronics en inglés) implica el concepto de microrrobots capaces de conectar y formar estructuras complejas. Cada microrrobot tiene la forma de un cubo, donde cada lado puede bloquear físicamente el microrrobot de su lado, así como moverse, a través de electroimanes, en relación con los microrrobots cercanos.
Cada microrrobot puede denominarse «argibot», una combinación de «argilotrônica» (término portugués para claytronics) y «robot». En la práctica, los argibots funcionan de forma similar a las células biológicas, interactuando entre sí y formando estructuras más complejaso.
2. Tipos de argibots
Hay cinco tipos de argibots que componen cualquier cosa modelada con materia programable: estructurales, energéticos, reparadores, manufactureros y conductores. Cada tipo tiene una función específica, que se describe a continuación
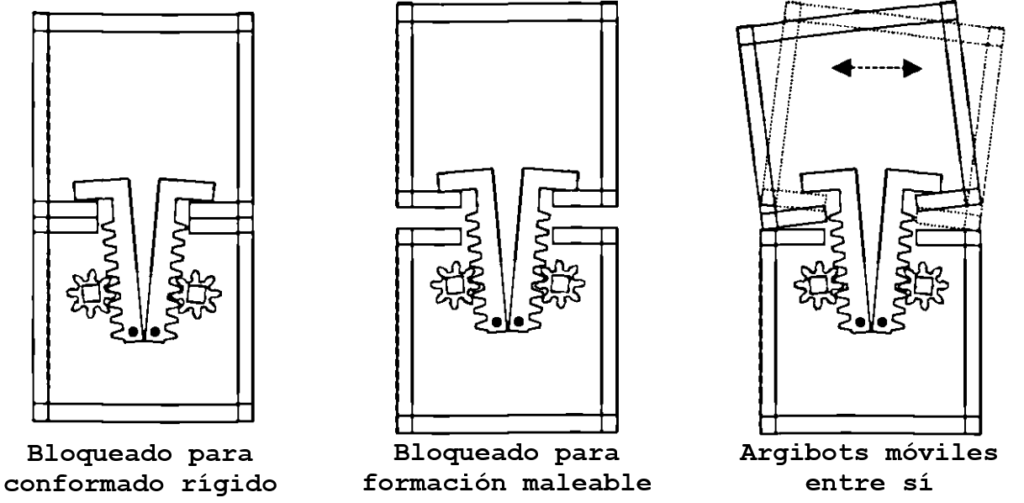
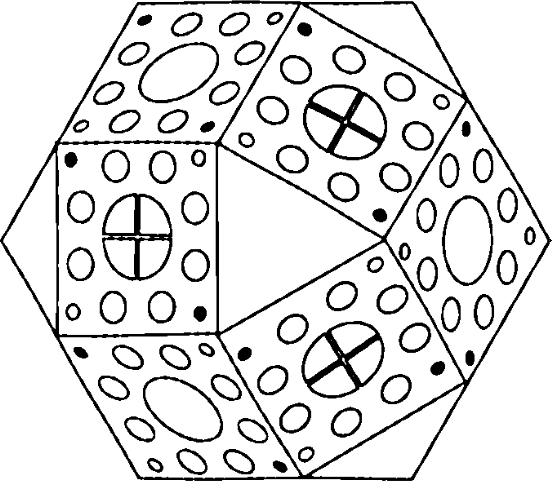
Los argibots estructurales fueron los primeros en desarrollarse. Son cubos diminutos con aristas y vértices ligeramente redondeados para facilitar su desplazamiento sobre los argibots cercanos. Su forma cúbica permite una mayor área de contacto, lo que proporciona mayor resistencia física. Cada cara tiene ocho electroimanes y un ajuste bilateral. Véase la ilustración abajo:
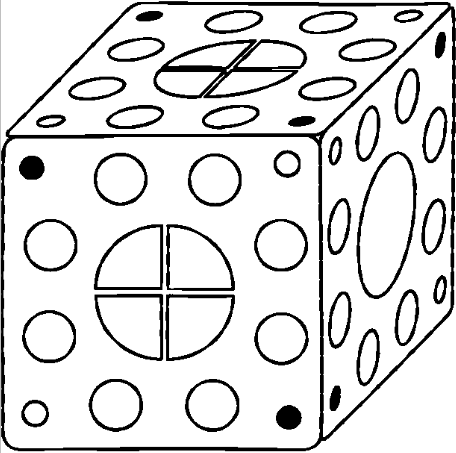
Existen dos disposiciones para cada cara, con orificio o con herraje retráctil.
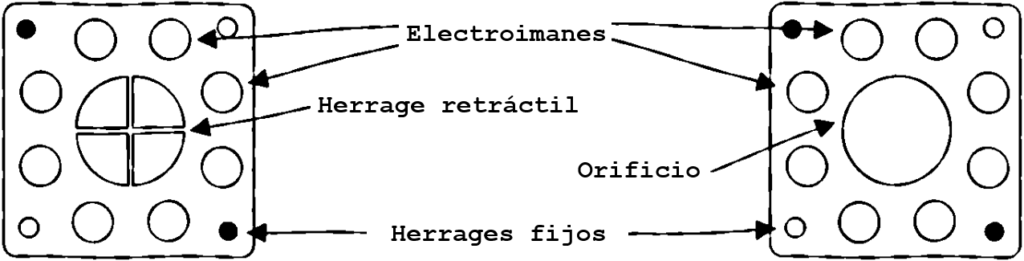
Tres lados tienen el herraje retráctil y los otros tres tienen el agujero.
En cada cara existen cuatro herrajes fijos, dos de los cuales son orificios y dos salientes, con el fin de proporcionar mayor firmeza en el encaje de los argibots.
El herraje retráctil tiene varios puntos de bloqueo, de modo que los argibots pueden quedar firmemente sujetos o más sueltos, como si fueran una cadena o malla. A continuación se ilustra un posible tipo de conexión.
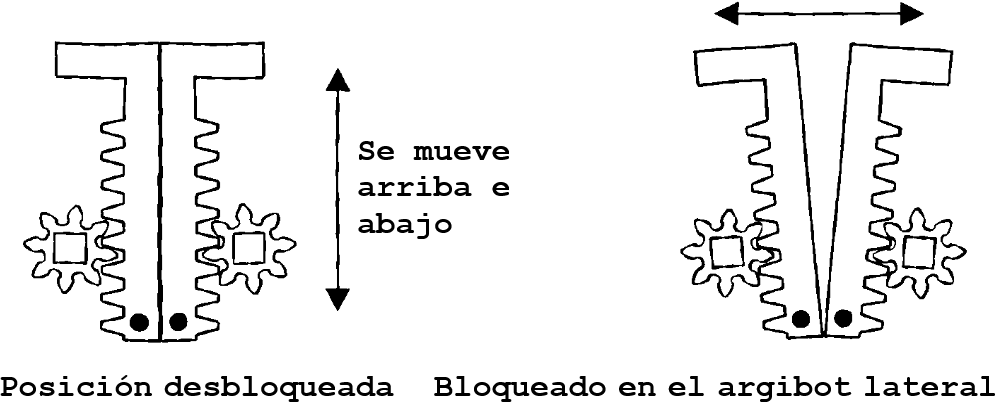
La siguiente ilustración muestra cómo funciona el accesorio:
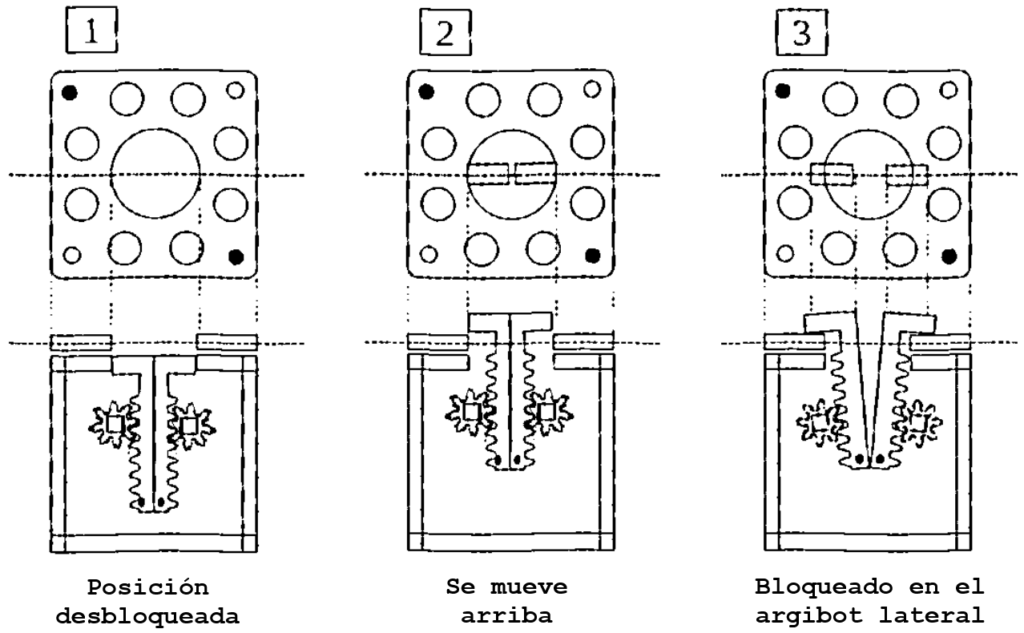
Y las disposiciones de bloqueo son las siguientes:
2.2 – Argibots energéticos
Para que la materia programable tenga usos prácticos, los argibots deben ser diminutos. De hecho, cuanto más pequeños sean, más versátil puede ser la materia programable. Pero la miniaturización crea un problema adicional: la energía. Mientras los argibots estructurales estén en posición de bloqueo, fijos o maleables, no hay gasto de energía. Sin embargo, cualquier cambio conformacional requerirá energía, un recurso escaso en los argibots estructurales. Así que, dentro de la «masa» de materia programable, se colocan argibots energéticos, que tienen la tarea de dar energía a los argibots estructurales y a otros.
Deben ser mucho más extensos que los estructurales y no necesariamente tienen que ser cúbicos. Para cargar su batería compacta se utilizan los propios electroimanes. Hay ocho en cada cara del argibot; luego se pueden utilizar cuatro para unirla a la energética, mientras que las otras cuatro reciben la energía.
A continuación se ilustra una posible configuración para argibots energéticos.
2.3 – Argibots reparadores
Por más resistentes que sean los argibots, en algún momento se desgastarán y se romperán. En este caso entran en juego los argibots reparadores, cuya función es realizar reparaciones menores a otros argibots. Para ello deben tener alta movilidad y es ventajosa una forma más esférica, como se muestra en el punto anterior.
Algunas caras de este tipo de argibot deben estar destinadas a ser una especie de paso para las herramientas que se utilizarán en las reparaciones. Si la reparación no se puede realizar localmente, el argibot defectuoso debe llevarse a un fabricante para que lo repare o lo utilice como materia prima para construir otros argibots..
2.4 – Argibots fabricadores
Son los argibots de mayor tamaño, ya que se utilizan para reparar o fabricar otros argibots. Deben contener espacio para almacenar materias primas (que puede ser externo) y para ensamblar al menos un argibot estructural. Además, solo pueden fabricar piezas que serán ensambladas externamente por reparadores, lo que les permite fabricarlas ellos mismos.
Dada la complejidad de sus funciones, también pueden ser una especie de centro de control que oriente la conformación y comportamiento de toda la masa de materia programable.
2.5 – Argibots conductores
Son argibots que pueden distenderse o contener en su interior alambres enrollados o tubos flexibles. Estos pueden estirarse para transportar materias primas líquidas o, en el caso de cables, transmitir energía o datos.
Dada su función altamente especializada, quizás no sean útiles en todo tipo de aplicaciones, pero sí serían muy útiles en el caso de construir algo hecho de material rígido o en lugares donde hay mucha interferencia externa en la transmisión de datos.
2.6 – Argibots especiales
Además de los tipos mencionados, pueden existir otros, como los con forma de cuchilla para cortar, emisores láser o más resistentes para formar una protección o escudo para otros argibots más frágiles. En definitiva, las posibilidades son ilimitadas.
3 – Conclusión
La arcillotrónica tiene muchos usos prácticos. Se puede usar para crear estructuras que se moldean solas, que son rígidas, flexibles y más. La única desventaja es que siempre será más frágil que las estructuras hechas de materia rígida.